Sorry, folks (that is, the two of you who read my blog), it's been a while since I posted anything. Between the holidays, a family vacation, cold weather, everyone getting sick, and well.. you know the drill.
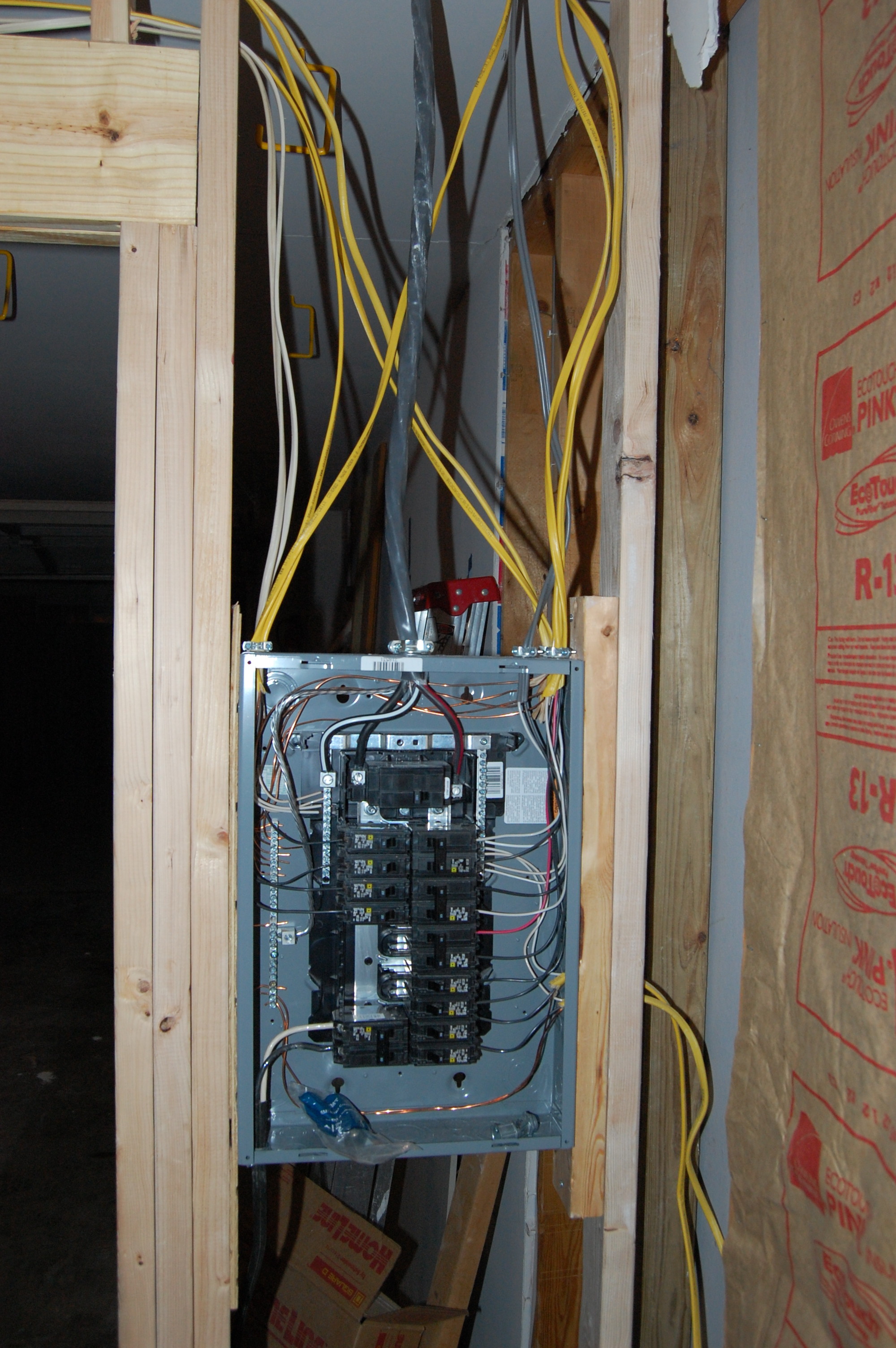
I haven't made as much progress on the workshop as I'd hoped I would by now, but progress is being made. The wall is framed, I have the subpanel mounted, and I have most of the new branch circuits wired in the workshop. I still have to wire ceiling outlets for the lights, and I have to finish up some minor odds and ends with some of the branch circuits. I then have to run conduit between the main panel and the subpanel and run the wires to supply power to the subpanel. I had hope to do that this weekend, but it turns out that we're babysitting my sister's special needs son, so time in the workshop will probably be little-to-none.
I'm looking into air conditioners and have pretty much decided on ordering a mini-split system off the Internet. There appear to be plenty of shady retailers out there willing to sell me cheap junk. And I'll probably go that direction, even though the little voice inside me is warning me not to.
After the electrical is run I'll have the rough inspection. Then I'll install the insulation and invite a handyman out to hang the drywall and tape and bed the seams. I'll look for cheap shelving and other fixtures on craigslist.